|
I am currently a second-year PhD student at UMass Amherst, where I am supervised by Prof. Chuang Gan and collaborate with Prof. Yilun Du. Previously, I graduated from Columbia's Fu Foundation School of Engineering with both an M.S. and a B.S. in Computer Science (Summa Cum Laude). I was fortunate to work under the supervision of Prof. Shih-Fu Chang at Columbia University and with Dr. Jim Fan, Prof. Yuke Zhu, and Prof. Anima Anandkumar at NVIDIA Research. My research interests lie in the area of Spatial Intelligence, Embodied AI, and Multi-modal Foundation Models. CV / Google Scholar / Twitter / Github |

|
|
|
(* indicates equal contribution) |
|
|
Yuncong Yang*, Jiageng Liu*, Zheyuan Zhang, Siyuan Zhou, Reuben Tan, Jianwei Yang, Yilun Du, Chuang Gan NeurIPS 2025 project page / paper / code We proposed MindJourney, a test-time scaling framework that improves spatial reasoning with the assistance of controllable world models. |
|
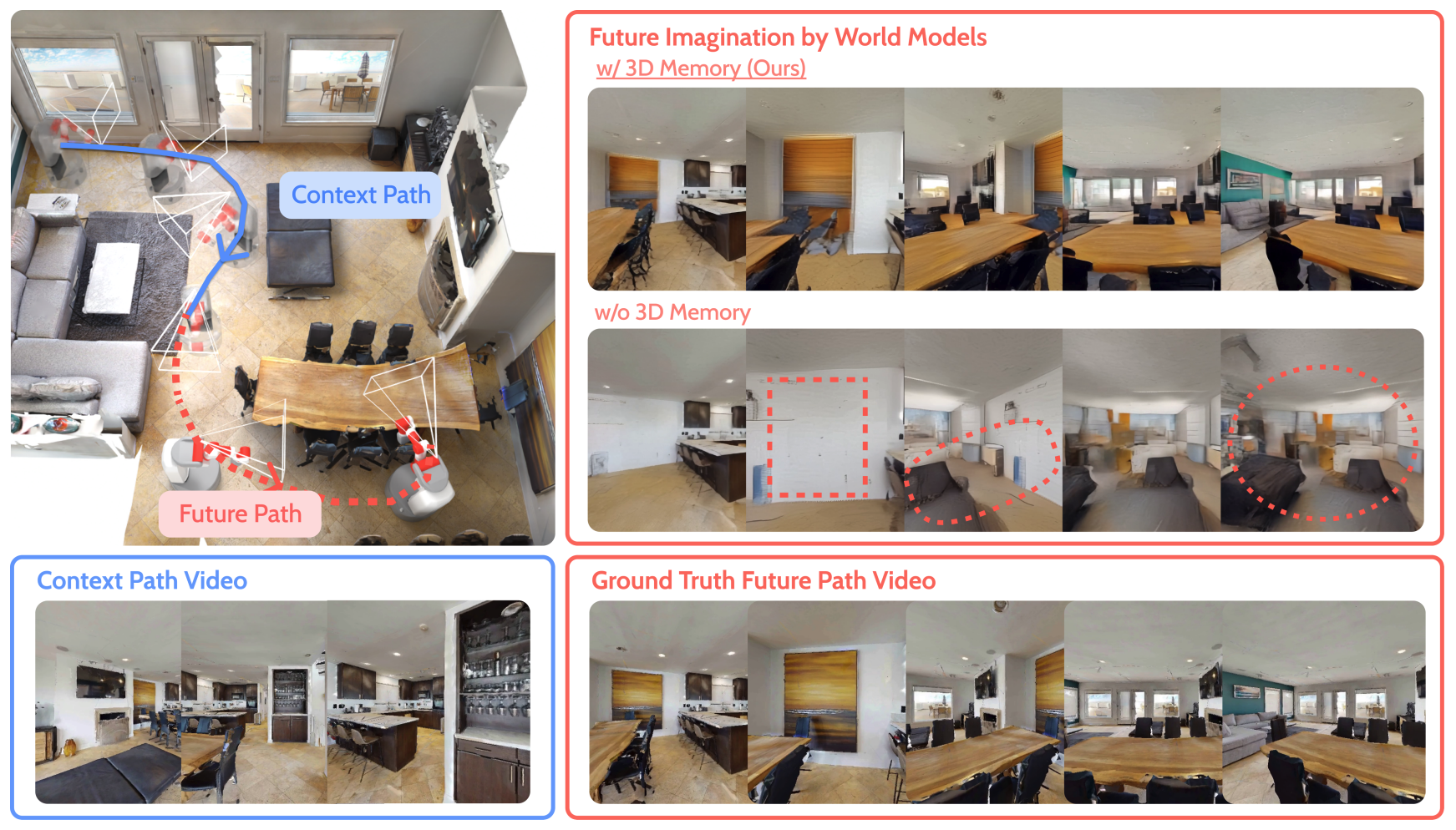
Siyuan Zhou, Yilun Du, Yuncong Yang, Lei Han, Peihao Chen, Dit-Yan Yeung, Chuang Gan NeurIPS 2025 paper |
|
|
Yuncong Yang*, Han Yang*, Jiachen Zhou, Peihao Chen, Hongxin Zhang, Yilun Du, Chuang Gan CVPR 2025 project page / paper / code / twitter We proposed 3D-Mem, a framework that serves as 3D scene memory to empower embodied agents with lifelong exploration and reasoning abilities in 3D environments. |
|
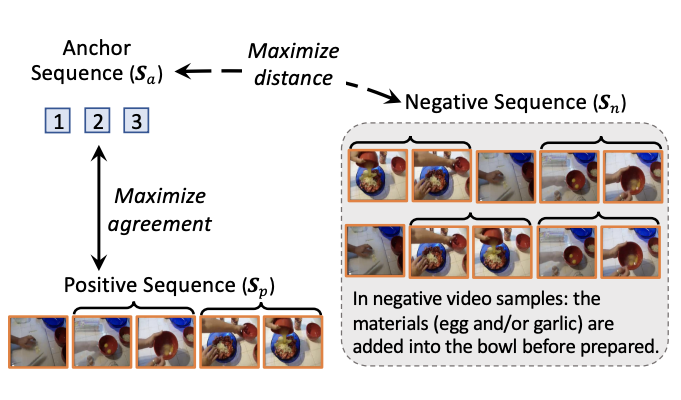
Yuncong Yang*, Jiawei Ma*, Shiyuan Huang, Long Chen, Xudong Lin, Guangxing Han, Shih-Fu Chang ICLR 2023 paper / code We proposed TempCLR, a new contrastive learning framework that considers sequence-level temporal order consistency in Long-Video Understanding. |
|
Linxi Fan, Guanzhi Wang*, Yunfan Jiang*, Ajay Mandlekar, Yuncong Yang, Haoyi Zhu, Andrew Tang, De-An Huang, Yuke Zhu, Animashree Anandkumar NeurIPS 2022 Datasets and Benchmarks Track (Outstanding Paper Award, Featured Paper Presentation) project page / paper / code We introduce MineDojo, a new framework based on the popular Minecraft game for building generally capable, open-ended embodied agents. |
|
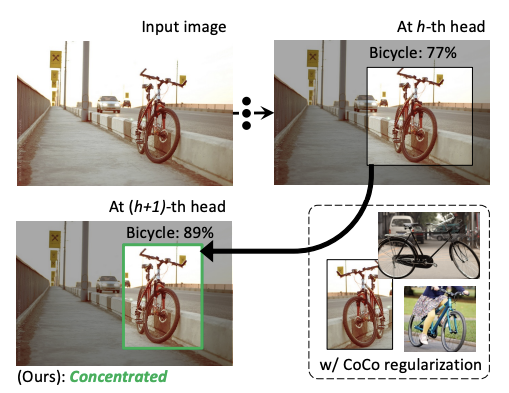
Jiawei Ma, Guangxing Han, Shiyuan Huang, Yuncong Yang, Shih-Fu Chang ECCV 2022 paper
|
|
|
|
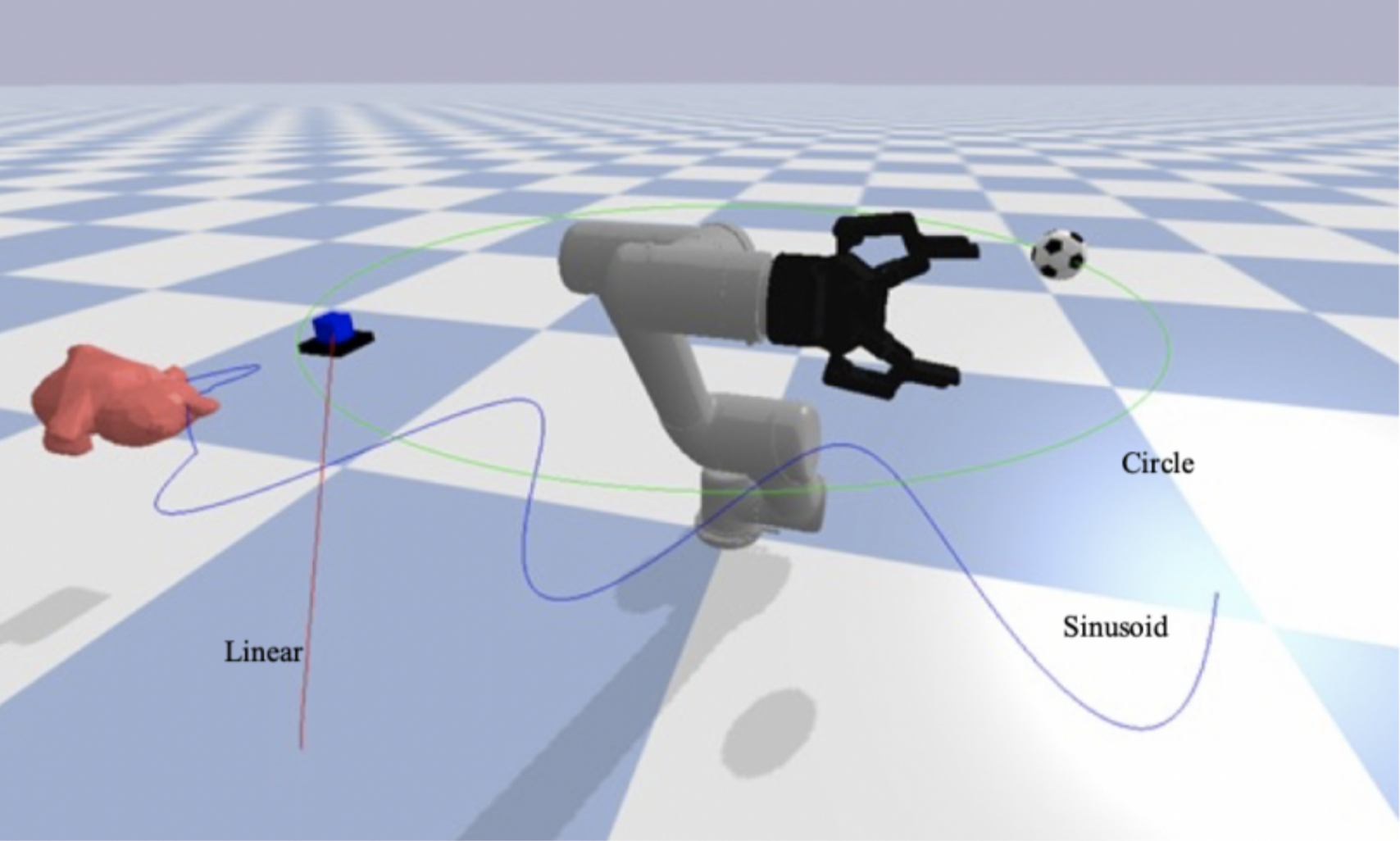
COMS 6998 Topics in Robot Learning, Fall 2021 report |
|
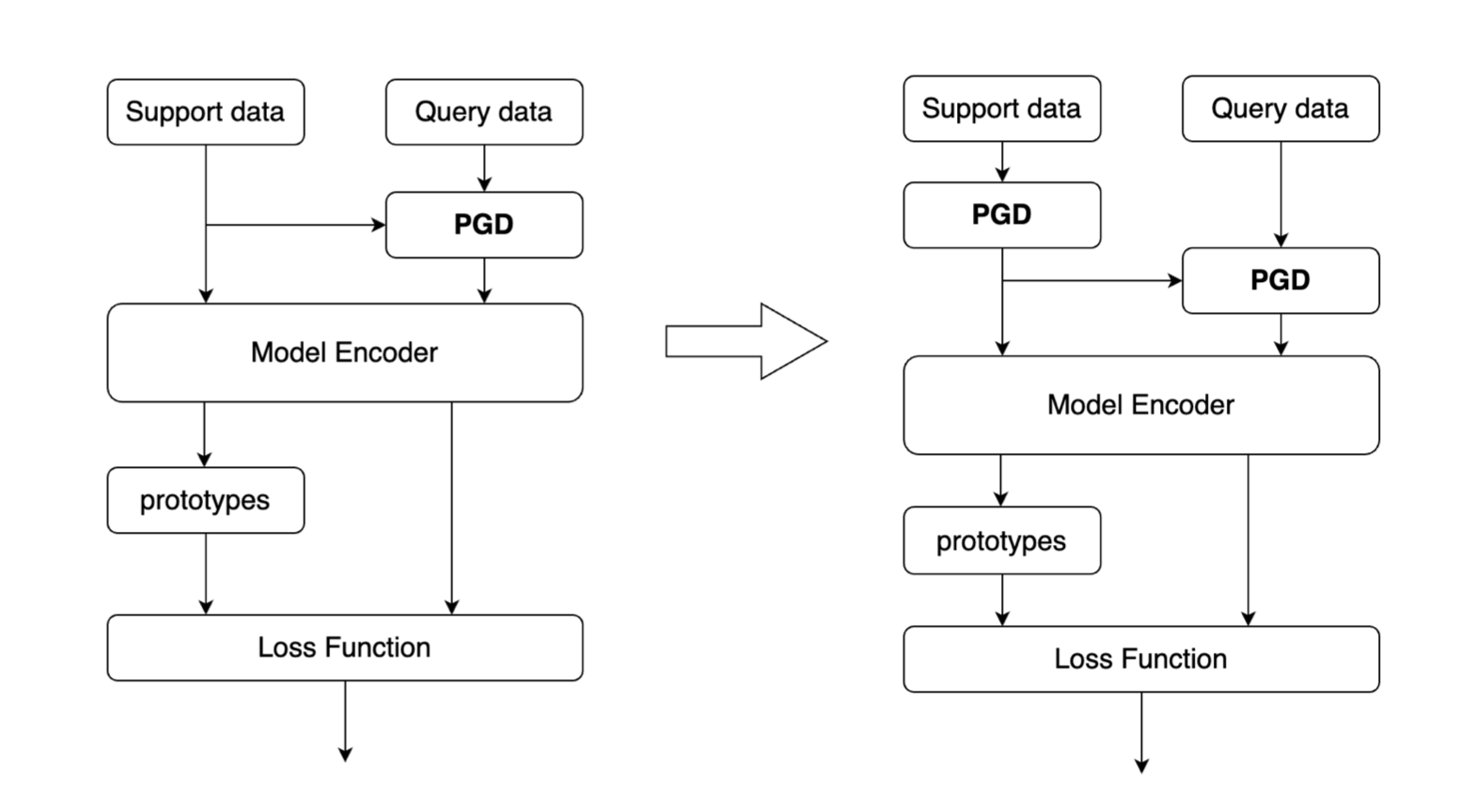
COMS 6998 Security Robustness ML Systems, Fall 2021 paper |
|
|
| Teaching Assistant: COMS 4732 Computer Vision II (Spring 2022) |
|
Thanks for the template from Jon Barron! |